stack-chan
スタックチャン ケース v0

現在、ケースデータはFusion360で作成しています。
ケースは新しい仕様(v1.0)に移行中です
より互換性を高めた新しいケースに移行中です。
- ケース v0(このドキュメント)
- 基板:
v0.2.1 - 対応するサーボモータ: RX30X, SCS0009, SG90
- 基板:
- ケース v1.0
- 基板:
v1.0 - 対応するサーボモータ: XL330(随時追加予定)
- 基板:
最新仕様のケースはスタックチャン ケース v1.0のドキュメントを参照してください
編集
各ディレクトリのSTEPファイルをCADでインポートすると編集できます。
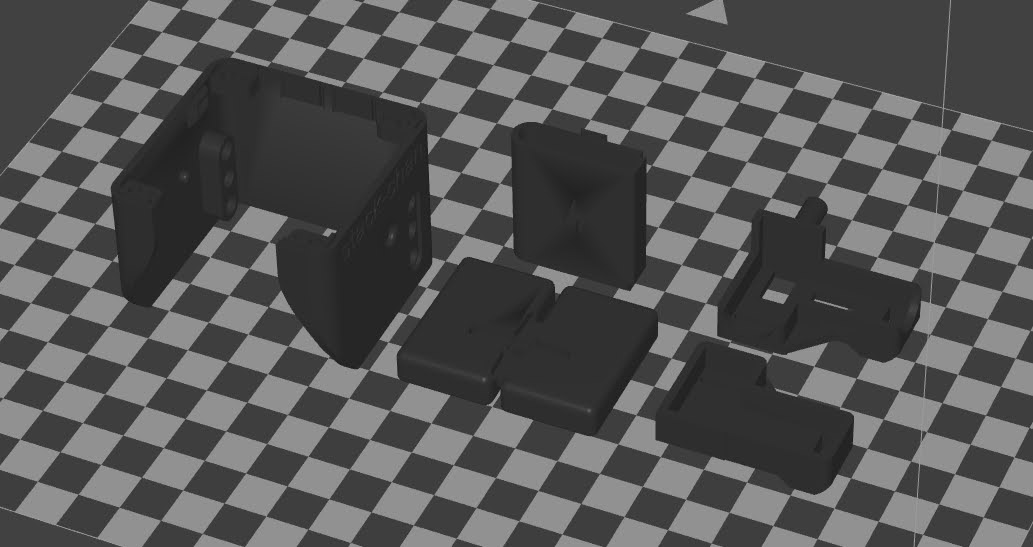
3Dプリント
各ディレクトリのSTLファイルを使って印刷ができます。 印刷の向きは次図のようにすると、仕上がりがきれいです。
組み立て
パーツ
- 3Dプリントしたケース
- 外殻(Shell)
- 足(Feet)
- ブラケット(Bracket)
- バッテリーケース(Battery backpack)
- M5Stack Core (Basic/Gray/Go/Fireのいずれか), またはCore2
- Stack-chan 基板
- サーボモータ2つ
- 現在次のモータで動作確認しています
- シリアルサーボ RS30Xシリーズ(TTL通信)
- シリアルサーボ SCS0009(TTL通信) serial servo
- PWMサーボ SG-90
- 現在次のモータで動作確認しています
- PH 2ピンのケーブル付きの3.7Vバッテリー
- 以下で動作確認しています
- ねじ
- M2 4mm * 4本
- M2 8mm * 2本
- (オプション)M3 15mm * 2本
シリアルサーボの設定
シリアルサーボは通信線を共有しており、IDを指定して角度変更や取得、トルクのオンオフなどを切り替える仕組みです。 そのためあらかじめ異なるIDを割り当てておく必要があります。
- ID1: 足側(左右回転、パン軸)
- ID2: 顔側(上下回転、チルト軸)
シリアルサーボのドライバにはIDを書き換えるコマンドflashIdがあります。
このコマンドを使うとスタックチャン基板のみでサーボのIDを設定できます。
サーボの角度について
サーボの取り付け角度は次のようにします。
- 可動範囲の中央が基準角度(スタックチャンが正面を向くときの角度)になります。
- 基準角度に十字のサーボホーンの凸が合うように取り付けてください。
- サーボの取り付け向きが間違っている場合、スタックチャンの筐体と干渉して正しく動作しません。
- サーボをケースに固定する前に、一度ファームウェアを書き込んでの動作確認をおすすめします。
- サーボの種類ごとに可動範囲と基準角度が異なります(次表参照)
| サーボ | 可動範囲 | 基準角度 |
|---|---|---|
| SG-90 | 0~180度 | 90度 |
| RS30X | -150~150度 | 0度 |
| SCS0009 | 0~200度 | 100度 |
(参考)SCS0009をGUIでセットアップする
次の設定をFeetech公式のGUIツールを使って行います。
- サーボのIDを変更する
- サーボの角度を基準角度に変更する
SCS0009本体に加えて次のものが必要です。
- URT1
-
6-9Vの電源
- GUIのデバッグツールをgitee(中国版GitHub)のFeetechのリポジトリからダウンロードします。
- URT1を接続します
- 「DC6V-9V」…電源
- 「USB」…microUSBケーブルを介してPCに接続
- 「G V1 S」…SCS0009を接続(同じIDのサーボを複数接続すると正しく動作しません)
FD.exeを開きます- URT1を接続したCOMポートを選択し、その他の値はデフォルトから変更せず「Connect」を選択します
- 「Scan」を選択します
- 左下に接続されたサーボが表示されるので選択します
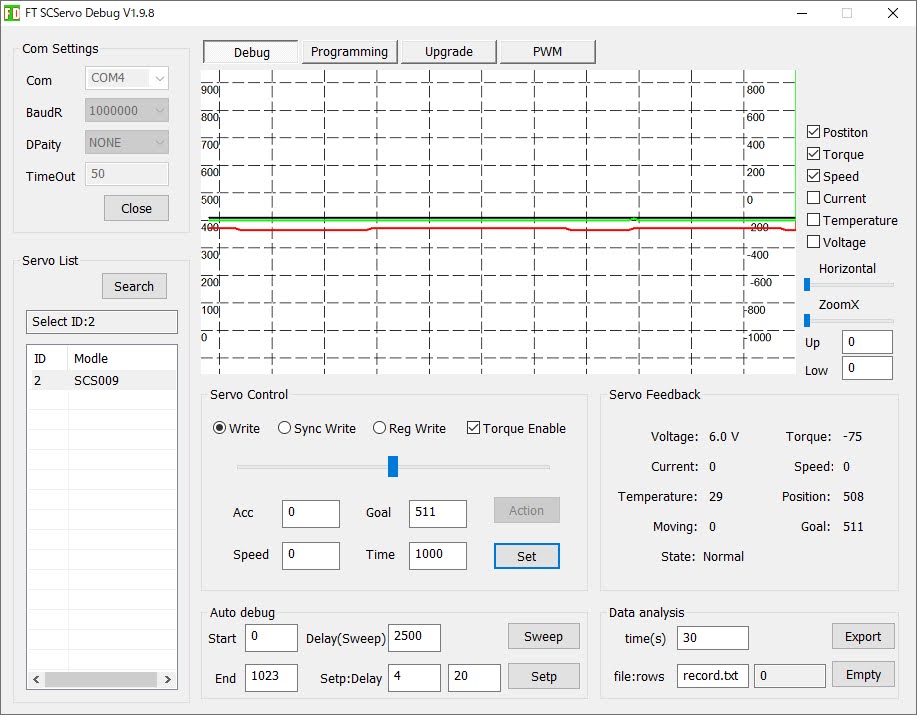
- 「Goal」の値を511にして「Set」を選択します
- サーボが基準角度まで回転します
- IDを変更する場合「Programming」タブを開きます。
- 「ID」の行を選択し、値を変更して「Save」を選択します。
- IDが書き換わります。
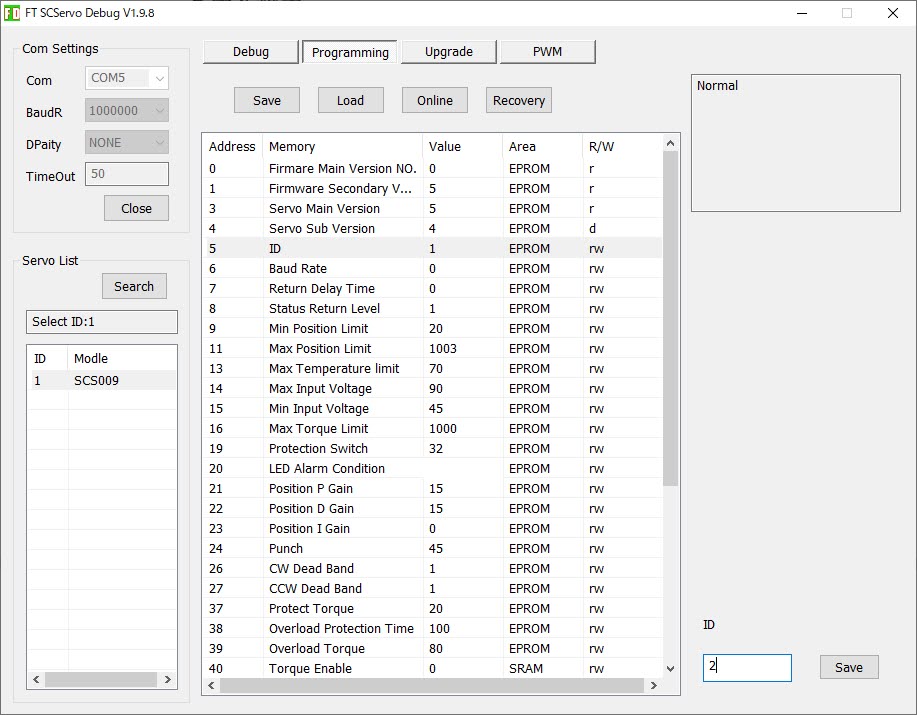
注意:ここで「Recovery」を選択するとサーボが正しく動作しなくなりますのでご注意ください
組み立て方
(RS304MDを使った場合です。SG-90, SCS0009も似ています)
ブラケット
- サーボをブラケットに差し込みます。
- シリアルサーボの場合、足側(左右回転)がID: 1のサーボ、顔側(上下回転)がID: 2のサーボになります。
- バッテリーをバッテリーケースに差し込みます。
- 爪を引っ掛けるようにしてバッテリーケースをブラケットに差し込みます。
外殻と足
- ねじで足と外殻を固定します(それぞれM2-8mm * 1本)
M5Stackと基板
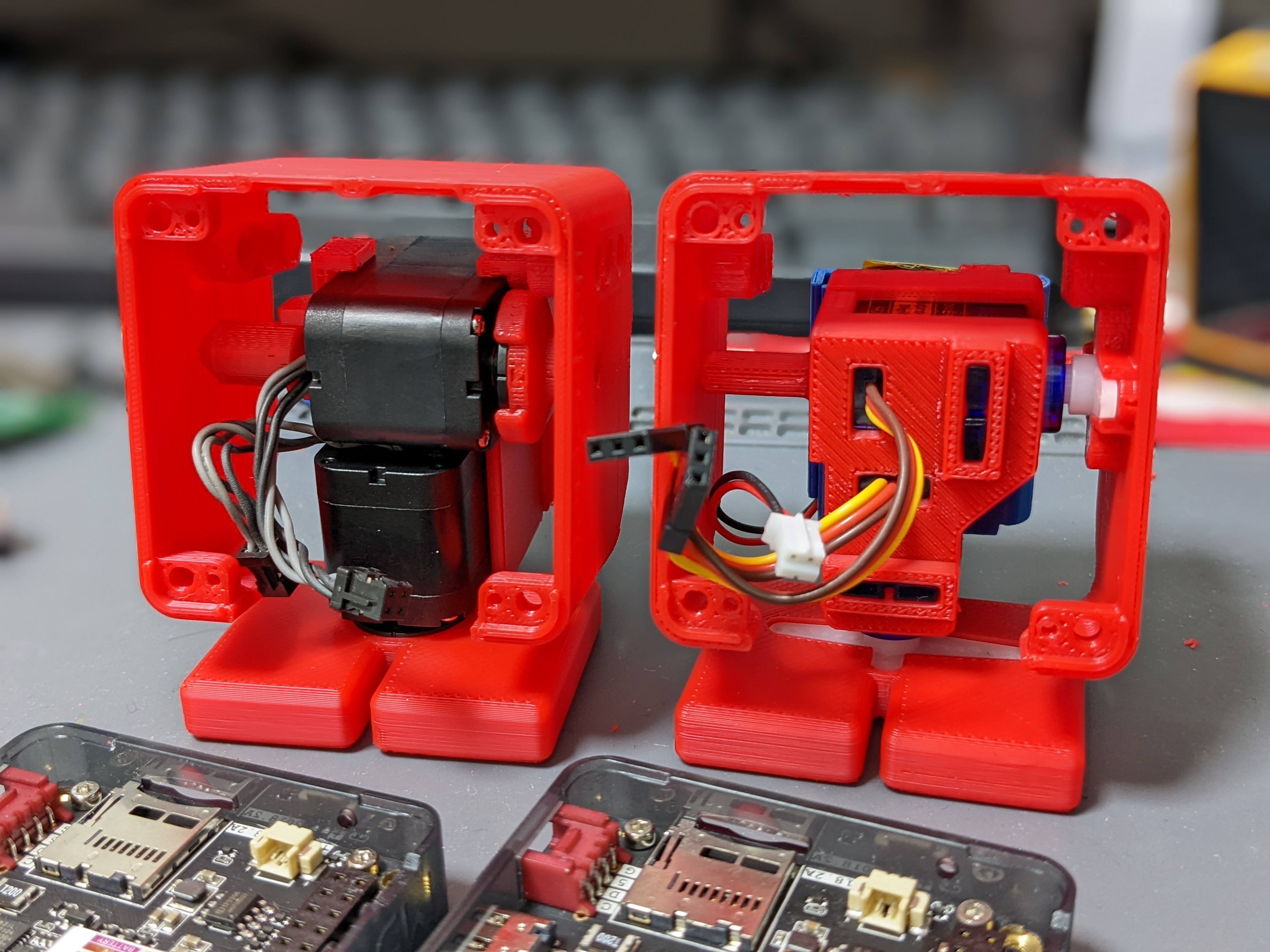
- サーボとバッテリーのケーブルを基板に接続します。コネクタの向きが正しいか確認してください。
- シリアルサーボの場合、ID1のサーボが足側(パン軸)、ID2のサーボが顔側(チルト軸)になります。
SCS0009の場合、信号線(白いケーブル)が右側のピンに接続されます。

- 基板をねじで固定します(M2-4mm * 4本)。
- M5Stackをロボットにスタックします。
- M5Stackを固定する場合、下側の2つの穴を使ってねじで固定します(M3-15mm * 2本)